Here We Go…
by russelblee on Jul.19, 2015, under Project Goon
Broken Bits
Ok. So it has been a bit since I posted. I have been dealing with the NXT Bricks breaking. The good news is Lego has agreed to fix them for me since it appears that it is a known issue with their screens. The bad news is it may take as much as three weeks to get them back. Bummer! In the mean time, let’s build some framework, shall we?
What’ll We Use To Build?
If you don’t know anything about the Tetrix components you may want to check them out at https://www.tetrixrobotics.com/ since that will be our mechanical base. We will also be using the NXT from Lego as a “Brain” and sensors from HiTech and Lego. Later we will add other sensors, some of our own design 😉
But Yer Honor, I was Framed…
If you remember the earlier post Keeping Tabs on McGoon we laid out a home base type of form factor for the robot. This is based on sound practices in that triangles are fairly stable, and, it gives us a fair amount of room for adding things later. The other side of that coin is that the Tetrix stuff is built primarily on 45 degree angles (0, 45, 90, 135, 180, and etcetera) and fixed lengths, so we are a little limited in how we put things together. How do we make this work, we improvise! Because our robot won’t be carrying huge loads we can compromise a bit on the structure, and actually make the robot a bit more furniture and ankle friendly. We will use some flat plates in the kit that we will form into arcs for our corners.

Flat Plate
Now, it may not be very evident, but here is the the first mistake I made while building the base. Do you see it? Anyone? I attached the plate too far up on the piece so it would not have room to make the bend it needs for the corner. This is much more what we need for the corners… You can see that having the flat plate so far up would never have worked without cutting the pieces. I probably should have mentioned this before, but I am trying to leave the pieces whole for this go-round because it is a “temporary” platform.
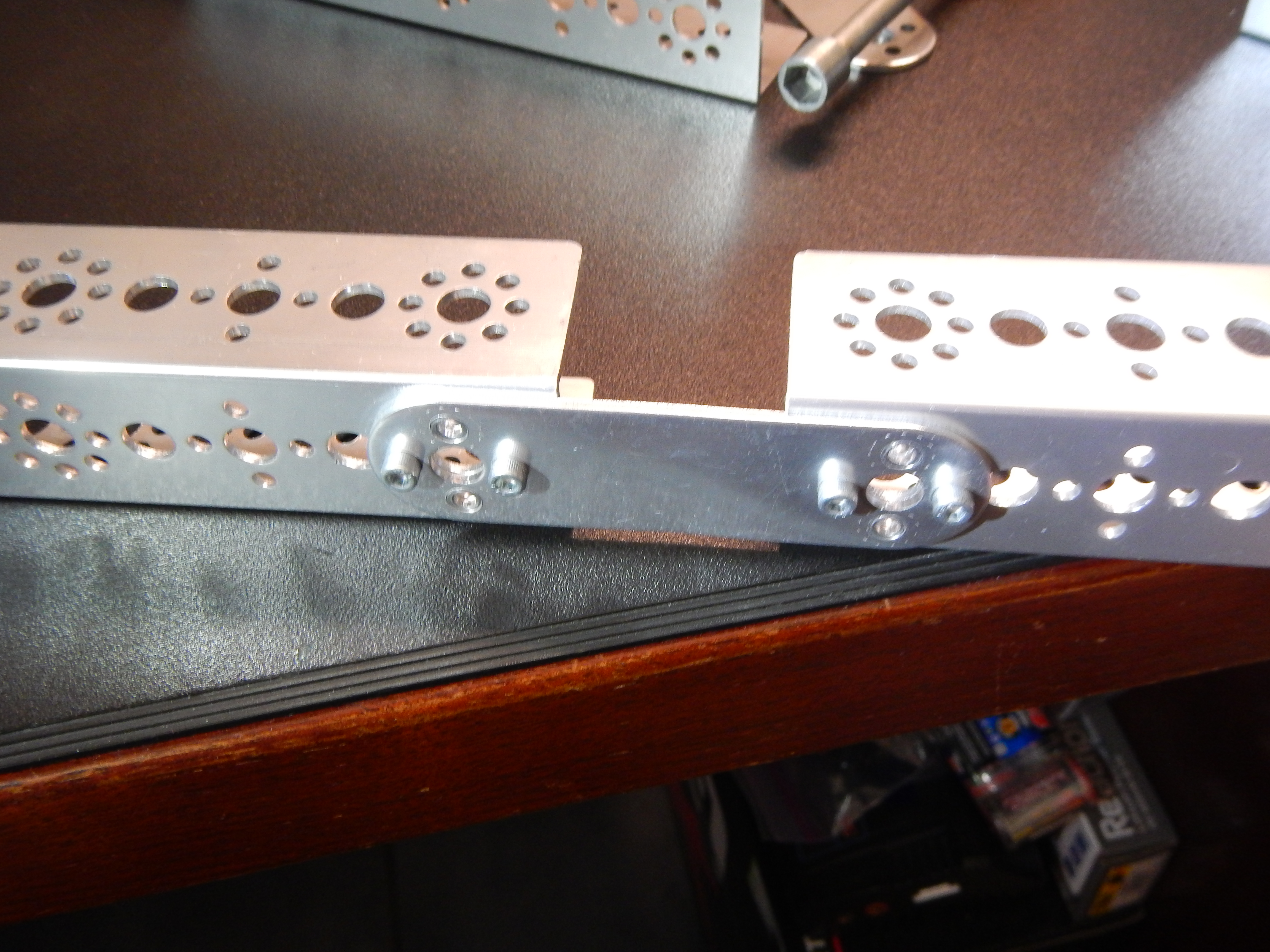
Plate in the Right Place

After Bend
So using that technique I built the angled joints and then I used the same plates to join the top and bottom for the 90 degree angles at the front. Next comes the wheels. Tetrix uses brass bushings to support the axles and it is always a good idea to have at least TWO bushings per axle. So, we use a small piece bolted to the bottom of the frame for both front wheels.

Front Wheel Mount
This gives us two holes to insert bushings into for axle support. Note that I used all four screws on this mount. I did that to maximize the strength of the piece and keep it as rigid as possible. Once the bushings are inserted everything should be good and stable.
Makin’ It Move
Now let’s talk about drive motors and the drive train… There are three main methods for driving wheel in the Tetrix set; 1) Direct connection to the motor output shaft, 2) Connection through gears, and 3) connection through a drive chain like the one on a bicycle. I have chosen to use the chain for this project because it is lighter than the gears (Textrix gears are really beefy) and I don’t like direct drive as the bearings on the motors really aren’t good for supporting the whole robot and it may make the motors fail sooner.
Next Time
I think that is about it for today. Next time we will look at mounting the front motors and setting up the chain and sprockets to drive them. Until then, please keep those cards and letters coming (well, you could be the first 🙂
P.S.
I have been reading a lot about AI lately, both fiction and non-fiction, and I will be writing up some of my thoughts about that reading soon as well.
-
HOWDY!
Welcome to my mini public universe.
Share With Others? Maybe?











